Its been a little over two months since I completed my first flight, and I’ve got 11 hours on the plane now over 16 flights. I’ve spent a lot of time performing as many tests as I can combine into each flight, and I have only two remaining tests: Calculating Vx and Vy, and Calculating Best Glide. I’ve been using the EAA Test Cards (version 2) according to my operating limitations, which states 40 hours or completion of a task based flight test program.

I’ve been slowly expanding my flight envelope and exploration area. My phase 1 test area is a 100nm radius circle around E16 (excluding Class B, C airspace). The large flight area has allowed me to find some cheap gas and smooth air to do some of the more precise testing.
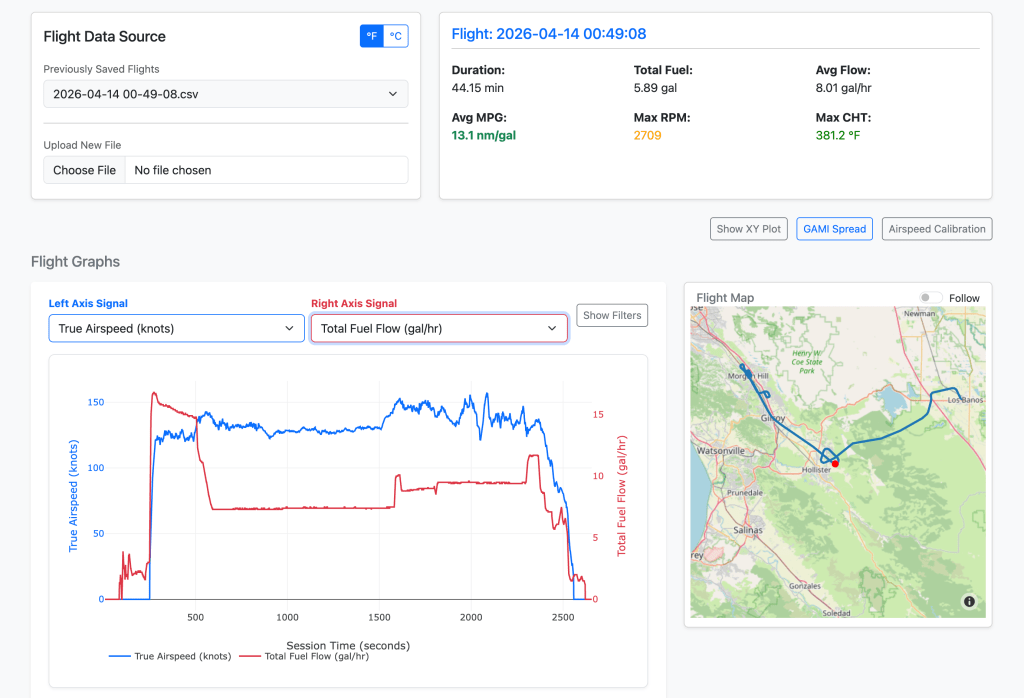
Airspeed calibration in particular has been fun, and I’ve found I needed to make a slight correction to the static ports. My airspeed originally read 7 knots fast, but with the addition of a small 1/32″ washer cut in half behind each of the ports the airspeed now reads about 1 knot slow (more conservative). I tested this at multiple altitudes and airspeeds and its pretty dialed in now.
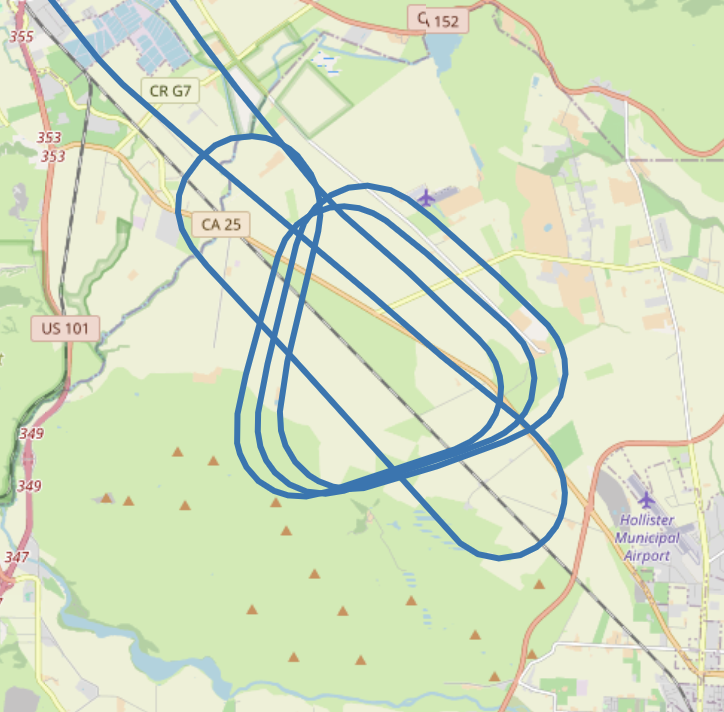
Here is a summary of a sub section of those triangles. I trimmed the plane out at 3500 ft 24″ manifold and 2400 rpm. This was one of the calmer days I could get this test done on, but the error is consistent across the different flight conditions. The heading correction is basically the magnetic deviation for my area. What this data shows is that my true airspeed displayed on my EFIS is 1.6 knots (average) lower than my actual. These speeds are without the landing gear fairings and wheel pants, which can add about 12 knots to that (I’m excited for this!)

Some of the other testing I’ve done so far include calibrating my Angle of Attack indicator as well as stall testing. Since I needed to calculate my stall speeds, and perform stalls to calibrate the AOA meter, I combined those tests. My plane has a flap position sensor, which allows the Dynon AOA to be calibrated for multiple flap positions.
The procedure requires performing four 5 deg pitch up and down oscillations then a few stalls for each flap position you want calibrated. I performed the calibration with flaps up and flaps full. My normal approach procedure is half flaps on base and full flaps on final, so I decided to keep it simple.
I also determined that my stall speed clean is 55 Knots (64mph) and my stall speed at full flaps was 50Knots (58 mph).

I’ve been experiencing some wheel shimmy under light braking after landing, which is not uncommon on these airplanes. I recently installed a wingtip camera mount, and I was able to capture the shimmy on one of my landings.
I will be installing the landing gear stiffeners that so many people recommend. I’m able to avoid this mostly by wheel landing and just avoiding using the brakes, which has been fine so far, but I will implement the stiffeners as part of the landing gear fairing work I still need to do.
I also completed all the dynamic and static stability testing, as well as trim effectiveness and runaway testing. The RV-7 design is pretty well understood and the aircraft behaved as expected through all the stability testing.
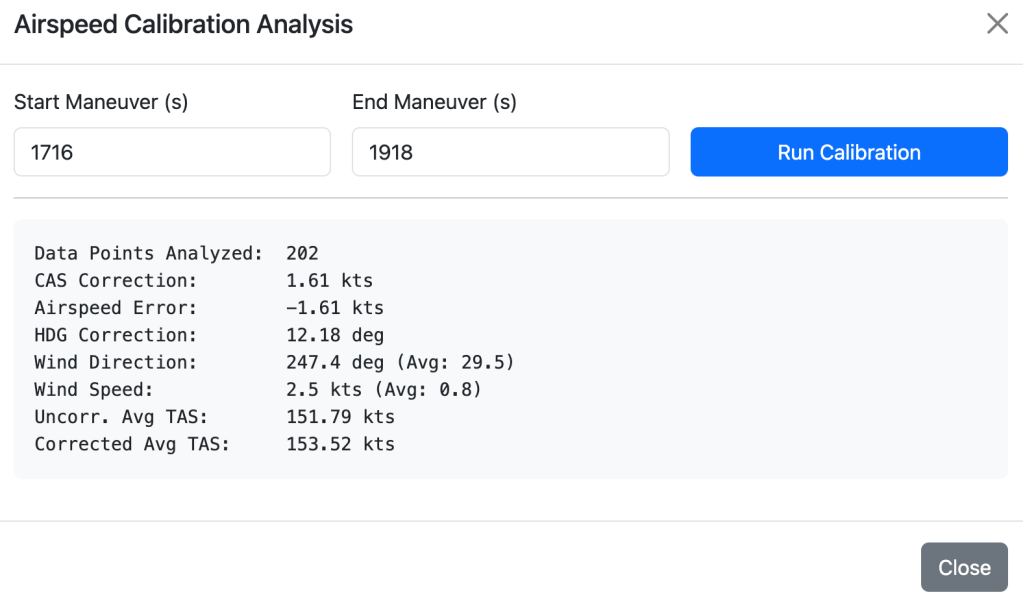
In doing all this flight testing I developed a python and web based analysis tool to help me plot and process the data that my Dynon SkyView HDX records.
I have been able to process all my flight data and aggregate it to try and extract engine break-in trends as well, which, based on my analysis, has completed. Engine CHTs have settled quite nicely (320s to 370s in cruise), with oil temps and consumption pretty stable (195 when air temp was 100deg F).
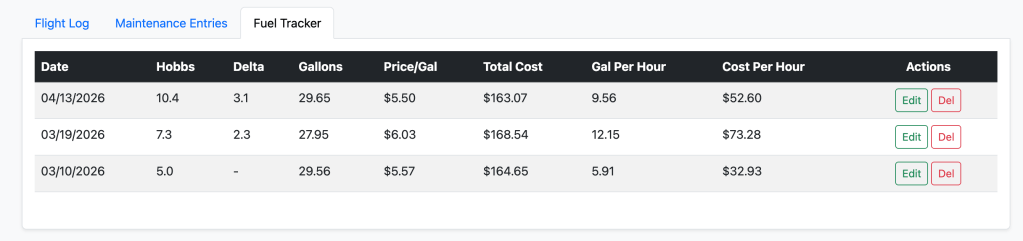
Part of the interface also has flight, maintenance, and fuel usage tracking. A lot of my initial flying has been at 75%+ power settings, often 80 or 85%, so I do expect to see some more efficiency gains in the future.

I’m nearly done with Phase 1 at this point. Just a few more tests to complete. I also will spend some time finishing up the landing gear fairings and wheel pants.

Leave a comment